
Our Team's History
Click on the game image to view more details about that year's game. To see details about past FRC games we've competed in, please see our Game History.Jump to a certain year:
2002-2003: Year One and First Competition

In 2002, a group of students at Avon High School started a FIRST robotics team called "The Cheetahs," as our main sponsor then was Cheetah Learning.
We competed in our first competition in 2003, "Stack Attack," and we ranked 9th and were eliminated in the quarter finals. We also won the Rookie All-Star award. Things were starting out great!
Top of Page
2003-2004: The ÜberBots!

Though our name was different, we were UberBots at heart, and we changed our name to the UberBots in the fall of 2004. We participated in the 2004 competition, "Raising the Bar," where we were ranked 27th and didn't make it into elimination. However, we competed at Bash at the Beach that year, an off-season competition hosted by the Techno Ticks, and were on the winning alliance.
Top of Page
2004-2005: Triple Play
In 2005 we competed in the game "Triple Play" and were ranked 10th, eliminated in the quarter finals.
Top of Page
2005-2006: Off to Atlanta
2005-2006


Game:Aim High
Robot Name: Chainey
Awards:
- UTC New England Regional Champions
- Bash @ The Beach Finalists
- Bash @ The Beach All-Business Award
In 2006, we decided to build a robot that could do everything-play defense, and score in the upper and lower goals in that year's game, "Aim High." Though we thought we may have over-extended ourselves, everyone was supportive and helped make last-minute changes at competition. After our final seeding match we were ranked 34th, but teams 177 (Bobcat Robotics of South Windsor) and 176 (Aces High from Suffield and Windsor Locks High Schools) had faith in our team and chose us to be their alliance partner. With a lot of team work and a little luck, the UberBots and our alliance partners battled our way to the top to win the UTC New England regional.
Our regional win that year qualified us for the 2006 national competition in Atlanta, and the long haul from Connecticut was definitely worth it. The memories created there will be with the team forever. The UberBots also competed in Battlecry @ WPI in June, and Bash @ the Beach in October, an offseason event that we participate in to this day. The Bash @ the Beach was a great competition for our team because it allowed us to work in a competitive yet low-key environment with the new year's team, as it takes place in October. We allied with teams 190 (Gompei Herd of Worchester, MA) and 500 (Waterford's Team USA) and placed second. We also received an "All Business" award commending "the team that is most serious about their robotics and their fun."
Top of Page
2006-2007: Time to Rack 'n' Roll
2006-2007


Game: Rack 'n' Roll
Robot Name: Dynamite
Awards:
- UTC New England Regional Champions
- Newton Field Finalists
- BattleCry 8 Highest Seed
- UTC CT Regional Rockwell Automation Innovation in Control Award
- Winter Warzone Finalists
- Winter Warzone Teamwork Award
- Bash at the Beach Champions
- Bash at the Beach Gracious Professionalism Award
- Bash at the Beach Top Seed
Riding our success in 2006, we decided to build another multi-functional robot for the 2007 competition, "Rack 'n' Roll." Our robot, which we named "Dynamite" included a 2-joint arm (with a "wrist" and "shoulder" motor and a gripper for a hand) which gave us great flexibility since we could both score by putting tubes on the rack and get points back by removing "spoiler" game pieces. Dynamite also had a set of deployable ramps long enough to hold two robots, which earned us bonus points. Dynamite also had hefty bumpers that allowed us to play defense if we needed to, and an autonomous mode with 16 different functions that allowed us to automatically raise Dynamite's arm to different heights and other useful things.
We were able to "Rack 'n' Roll" our way to the top, finishing as an alliance captain (in the top 8), and we ultimately won the UTC Connecticut Regional with team 195 (the CyberKnights of Southington) and team 558 (the RoboSquad from New Haven). For the second year in a row, we traveled to Atlanta to compete in the nationals, ending up in the Newton division again. This time, however, we were ranked third after the division seeding matches, and allied with teams 1592 (the Bionic Tigers from Cocoa, FL) and 1816 (The Green Machine, all the way from Edina, Minnesota!). Our powerful alliance brought us all the way to the division finals. The UberBots continued to Einstein as the backup bot for Newton's champion. After the Championship, we competed at Battlecry @ WPI, hosted by team 190, where we seeded 1st for the first time ever.
Top of Page
2007-2008: Shifting into OverDrive
2007-2008


Robot Name: Lightning
Awards
- Suffield Shakedown Winners
- Suffield Shakedown Spirit Award
- Connecticut Regional Kleiner Perkins Caufield & Byers Entrepreneurship Award
- Connecticut Regional Website Excellence Award
- Connecticut Regional Winners
- Championship Event Archimedes Division Winners
- Championship Event Einstein Semifinalists
- Where is Wolcott? Invitational Finalists
- Where is Wolcott? Invitational Design Award
- Where is Wolcott? Invitational Best Hurdler
- Where is Wolcott? Invitational Best Lap
- Where Is Wolcott? Invitational Friendliest Team
The game in 2008 was Overdrive, a fast-paced game where teams could score points either by carrying one of two game pieces per alliance, 40" diameter track balls, around the field, or simply by making laps. Teams could also earn points by "hurdling" the track balls over the 9-foot "overpass" in the middle of the field. The field was divided the long way down the center to give it a race-track feel. We responded to these aspects of the game in many ways as we designed and built our robot that year, Lightning.
We gave Lightning a two-speed transmission so that we could have both the speed to make it around the track and the precision to pick up the large track balls. To pick up and handle the large balls, we gave Lightning a 2-joint arm and a claw that could expand to wrap around the ball, then contract to keep possession of the ball as we moved around the field.
We built a second robot and a replica of the field in the space donated to us by Reflexite so that we could practice driving even after we had shipped our robot off after build season. We attended the Suffield Shakedown 2008 Scrimmage hosted by Team 176, Aces High. The competition was good practice for the new 2008 season's team, and it let us see how other teams had tackled the challenges of the game. Allied with team 230 (the Gaelhawks) and team 1784 (the Litchbots), we won the scrimmage undefeated. Our team was also successful off the field, winning the spirit award for the first time ever. We were looking forward to how we would fare at the Connecticut regional.
At the Connecticut Regional, we won all our qualification matches, allied with numerous other great teams, and placed first in seeding among the 62 teams at the competition. This was a mark of progress for our team, as only two years ago we had had to fix our robot after every match. For the elimination matches, we allied with team 175 (Buzz Robotics) and team 716 (the Who's-C-Teks). Through the quarterfinals, semifinals, and finals, our alliance went undefeated, winning the Connecticut Regional. During the award ceremony, we were honored with the Kleiner Perkins Caufield & Byers Entrepreneurship Award, recognizing our work in the community.
In 2008, the UberBots also competed in the Championship in Atlanta. In qualification, we achieved a 6-1 record, becoming the captains of the third alliance. We invited teams 1024 and 177 to be part of our alliance, creating a well-rounded team that could handle any situation on the field. Our alliance won in the quarterfinals and the semifinals, leading us to the finals where we faced another strong alliance captained by team 987. With past world champions and multiple regional winners on both sides, the competition was intense, but our alliance pulled through to become the champions of the Archimedes field. We advanced to the Einstein field, where we played teams who had advanced from other divisions. Our alliance faced even tougher competition there, but we became international semifinalists. 2008 was a great year for the UberBots. We went undefeated in all our regionals, and advanced all the way to the world semifinals in Atlanta.
Top of Page
2008-2009: Absolute Lunacy
2008-2009


Game: Lunacy
Robot Name: Vortex
Awards:
- 2009 Suffield Shakedown Champions (thanks 195 and 126)
- 2009 Hartford Regional Rockwell Automation Innovation in Control Award
In 2009, the game was Lunacy. Robots could only use special, slippery wheels, and they competed on a slippery surface of white, plasticky material called "regolith." The game was designed to simulate low gravity conditions in a lunar environment. To continue the theme, the gamepieces were small, light balls called "moonrocks." Robots started the game possessing up to 7 moonrocks, and many more were strewn throughout the field. Human players outside the field threw moonrocks at the trailers attached to each robot to score. Robots could also score on other robots by putting moonrocks into their opponents' robots' trailers.
We built our robot, Vortex, around possessing as many moonrocks as possible and being able to score them from a range. The main body had a sweeper that swept moonrocks into a spiral, which fed them up to the cannon. The cannon was aimed by a camera, which tracked the vision targets on the opposing alliance's trailers. Our systems team also created a sophisticated traction control system with encoders to minimize slippage on the slick field. As the competition progressed we modified our cannon to allow us to quickly dump multiple moon rocks into opponents' trailers at close range.
After a tough build season, our first event was the Suffield Shakedown, hosted by Aces High team 176, which we won on an alliance with teams 195 and 126. After that event, we competed in the Connecticut Regional. Although we didn't make it as far as we had in previous years, we won the Rockwell Automation Innovation in Control Award for our traction control system and autonomous mode.
As with every past year, we competed in Atlanta, Georgia, in the Championship. The competition was great and a lot of fun, and we managed to make it to the quarterfinals on the Galileo Field, where we were eliminated by the alliance that went on to win the entire Championship.
Top of Page
2009-2010: A Real Breakaway
2009-2010


Game: Breakaway
Robot Name: Striker
Awards:
- WPI Regional Chairman's Award
- Delphi Engineering Excellence Award
- Connecticut Regional Coopertition Award
- Connecticut Regional Rockwell Innovation in Control Award
- Hartford Regional Champions
In 2010, FIRST kicked off Breakaway, a game that looked a lot like soccer on the surface. The field was split into 3 sections by two 1-foot-tall bumps with tunnels in the middle, which allowed smaller robots to move between the sections without going over the bump. Robots were allowed to have kickers to kick the balls into 1 of the 2 goals per alliance at each corner of the field, for a total of 4 goals. Where the game stopped looking like soccer was at the end, where teams could climb up towers in the middle of the field for bonus points.
We knew we wanted our robot to be light, small, and maneuverable so we could quickly score as many soccer balls as possible, and so that we could move between sections of the field via the tunnels. In past years, we had always built our robot to do everything that it could. However, this year, because hanging was only worth 2 points, and soccer balls scored were worth 1 each, we decided that it made more sense to focus on scoring over hanging. Our robot, Striker, used a new drive system for us which gave each wheel a separate motor used window motors to turn the front and back wheels together. This allowed us to make tight turns and maneuver past defending robots to score. Though we built a pneumatic kicker that was quite effective, we mostly scored by "herding" or rolling soccer balls into the goals.
The UberBots had big plans for the 2010 season. Not only were we going to compete at 2 regionals for the first time ever, but we were planning to go for the Chairman's Award. The Chairman's award is the most prestigious Award given out by FIRST, to a team that spreads the message of FIRST, appreciation of science and technology, throughout their community. We had participated in many demos at schools and public places, and put together a video and an essay for the application.
Our first regional was the WPI Regional. It was an early competition, so many teams, including us, were not in our prime. We only made it to the quarterfinals, where we were eliminated. However, we won the Chairman's Award at WPI, even if we didn't make it to the semifinals. We also won the Delphi Engineering Excellence Award for our robot's elegant and simple design. The WPI Regional ended up going great, and it was good practice for our next event.
The Connecticut Regional was a fantastic event for the UberBots in 2010. We went undefeated throughout seeding and elimination matches, winning the competition on an alliance with Team 102 (The Gearheads) and Team 383 (Brazilian Machine). Since our robot was offensive, we scored high and also won the Coopertition award, which calculated points based on both our score and our opponents' score after each match. We had also helped numerous teams on other alliances during the competition, which is part of the Coopertition award. Because of our complex drive system which allowed us to switch between a swerve drive for tight turns, a rotated drive for kicking, and other modes, we were again awarded the Rockwell Innovation in Control Award.
The UberBots again went to Atlanta to compete in the Championship. The competition was intense, and we were eliminated in the quarter finals of our division. However, we still placed well overall because our robot was able to score many balls quickly.
Top of Page
2010-2011: Do the Logo Motion
In the 2011 season, FIRST celebrated its 20th anniversary as an organization. In honour of this landmark, the game was FIRST-themed. Called Logo Motion, robots attempted to hang inner tubes in the shape of the FIRST logo. At each end of the playing field were three 3x3 arrays of scoring pegs. Robots would hang tubes shaped in the three parts of the FIRST logo (triangle, circle, square) on the rack to score points. Tubes scored on higher rows of pegs earned more points than those scored on the lower pegs. If three tubes formed the FIRST logo (a triangle, circle, and a square; in that order), then the values for all three tubes would be doubled. In the autonomous period, robots would score UberTubes, which doubled the value of any tube scored over it. During the endgame, robots deployed smaller robots, called minibots, made out of FTC parts onto a 10 foot high steel pole. Minibots then raced to the top of the pole; the first minibot to trigger a sensor at the top would win extra points.

Top of Page
2011-2012: Let's Get Ready to Rumble!
2011-2012

Game: Rebound Rumble
Robot Name: Asteroid
Awards:
- Where Is Wolcott Finalist
- Where is Wolcott Best Design
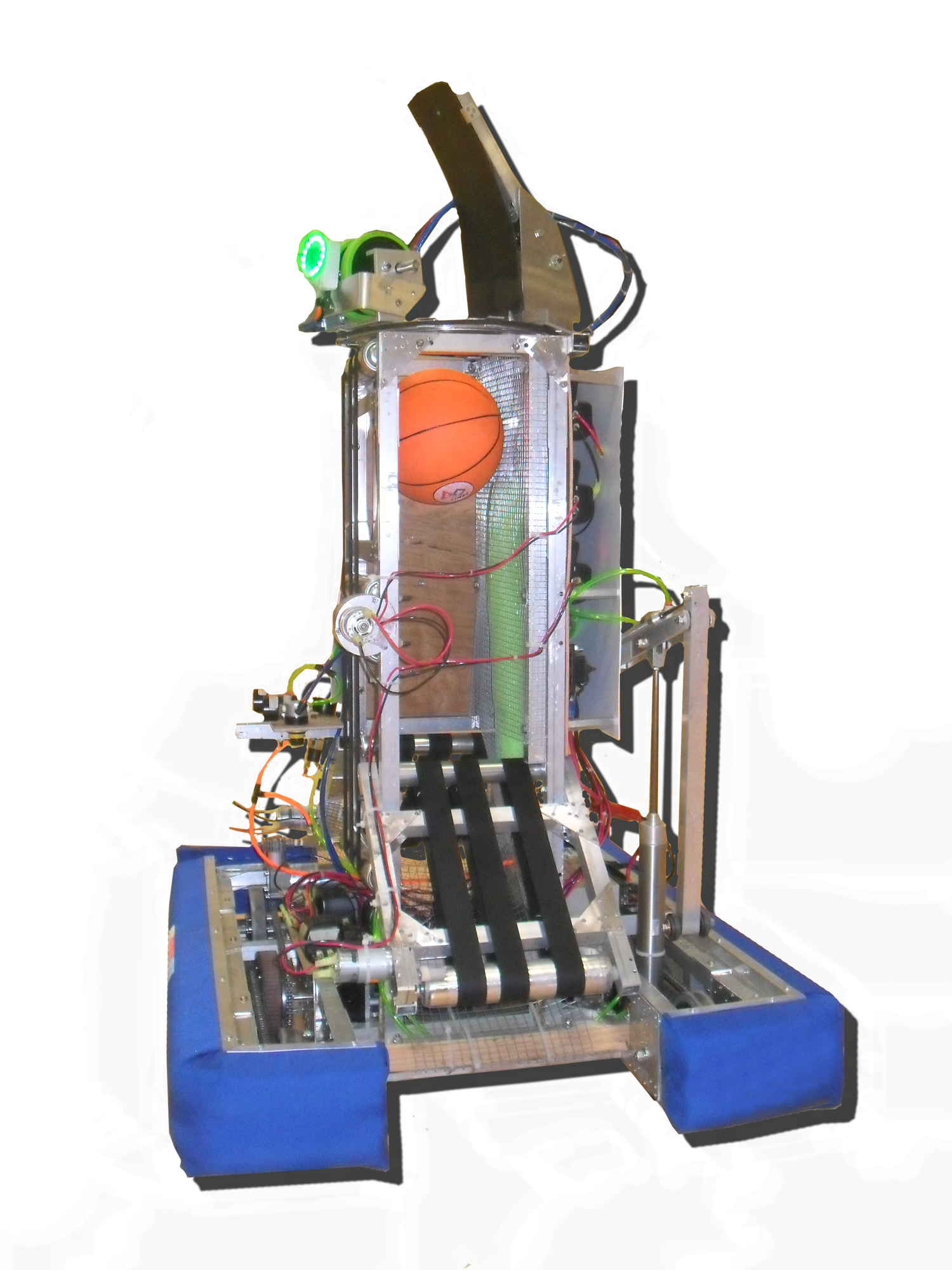
In 2012, FIRST created a basketball-esque called Rebound Rumble. Robots tried to score foam basketballs into a diamond shaped array of hoops. A ball scored in the highest hoop earns three points, a ball scored in one of the middle hoops earns two points, and a ball scored in the lowest hoop earns one point. Robots can track the vision targets on the backboards in order to aim effectively. During the first 15 seconds of the match, or the hybrid period, one robot per alliance can use a Microsoft Kinect to control their robot. During the last period of the game, robots have to balance bridges in the middle of the field. The more robots balanced on a bridge at the end of the match, the more points are earned for the alliance. During qualification matches, Coopertition points are earned by balancing the Coopertition Bridge with robots from both alliances.
This year, we designed and built a very simple yet efficient robot. The foam basketballs can be picked up from both the front and the back sides of the robot, thanks to a double sided belt system. Once the ball is picked up off the ground, a second belt system, known as the Tower, rapidly carries the ball up to the shooter level (the ball can go from the ground to the shooter in a matter of 1.5 seconds). As the ball is travelling up the Tower, the turret, resting on a Lazy Susan, targets the hoops, with the aid of a camera in front of the shooter, and retroreflective LEDs surrounding the camera lens. The camera looks for the hoops, and the turret rotates accordingly, while the shooting mechanism itself adjusts its speed in relation to the distance from the hoop, resulting in an accurate shot and basket each time.
Top of Page
2012-2013: Ultimate Ascent!


In 2013, FIRST created a Frisbee like game called Ultimate Asccent. Robots compete to score as many discs into their goals as they can during a two minute and fifteen second match. The higher the goal in which the disc is scored, the more points the alliance receives. The match begins with a fifteen second Autonomous Period in which robots operate independently of driver inputs. Discs scored during this period are worth extra points. For the remainder of the match, drivers control robots and try to maximize their alliance score by scoring as many goals as possible. The match ends with robots attempting to climb on pyramids located near the middle of the field. The robot earns points based on how high it climbs.
Top of Page
For more information about our team's past seasons and our alumni, please visit our Alumni Website at http://alumni.uberbots.org.


